
Abstract
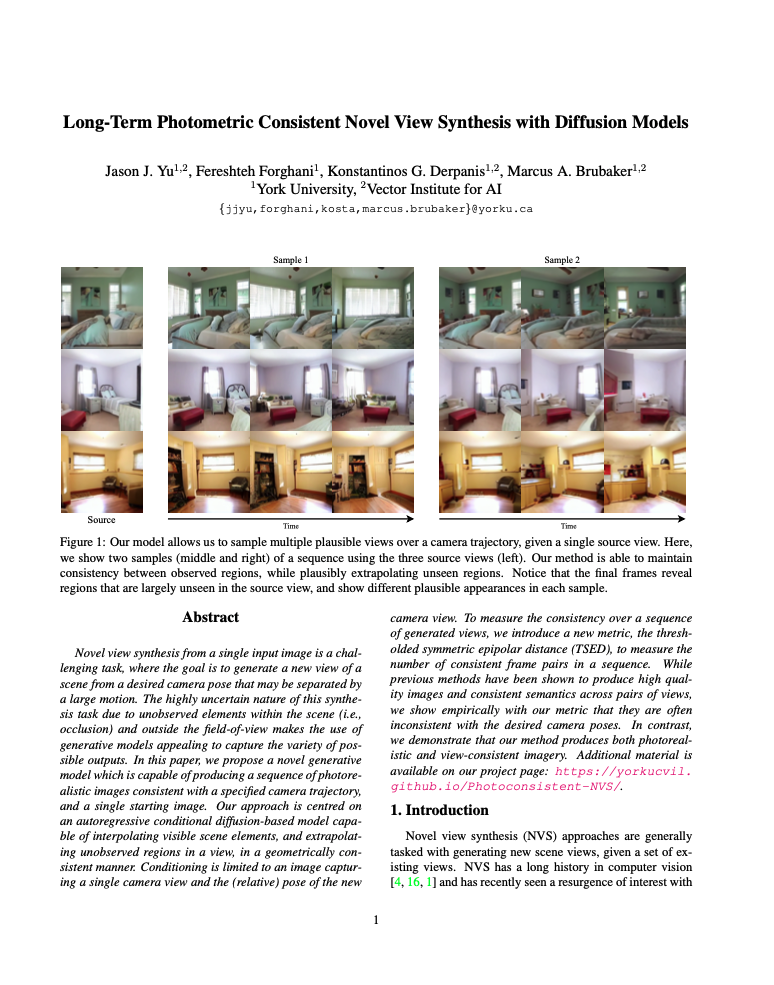
Novel view synthesis from a single input image is a challenging task, where the goal is to generate a new view of a scene from a desired camera pose that may be separated by a large motion. The highly uncertain nature of this synthesis task due to unobserved elements within the scene (i.e., occlusion) and outside the field-of-view makes the use of generative models appealing to capture the variety of possible outputs. In this paper, we propose a novel generative model which is capable of producing a sequence of photorealistic images consistent with a specified sequence and a single starting image. Our approach is centred on an autoregressive conditional diffusion-based model capable of interpolating visible scene elements and extrapolating unobserved regions in a view and geometry consistent manner. Conditioning is limited to an image capturing a single camera view and the (relative) pose of the new camera view. To measure the consistency over a sequence of generated views, we introduce a new metric, the thresholded symmetric epipolar distance (TSED), to measure the number of consistent frame pairs in a sequence. While previous methods have been shown to produce high quality images and consistent semantics across pairs of views, we show empirically with our metric that they are often in consistent with the desired camera poses. In contrast, we demonstrate that our method produces both photorealistic and view-consistent imagery.






 .
Then given a feature point
.
Then given a feature point  on the first image, the fundamental matrix constrains the location of
on the first image, the fundamental matrix constrains the location of  to a position on the line,
to a position on the line,  , on the second image.
The Symmetric Epipolar Distance (SED) given the points
, on the second image.
The Symmetric Epipolar Distance (SED) given the points 
 is the minimum Euclidean distance between point
is the minimum Euclidean distance between point  , we define the pair of images to be consistent if there are a sufficient number of matching features, and the median SED over M is less than a certain threshold:
, we define the pair of images to be consistent if there are a sufficient number of matching features, and the median SED over M is less than a certain threshold:
